If you’re still doing crack inspection with slow models (or humans), you’re leaving structural risk on the table.
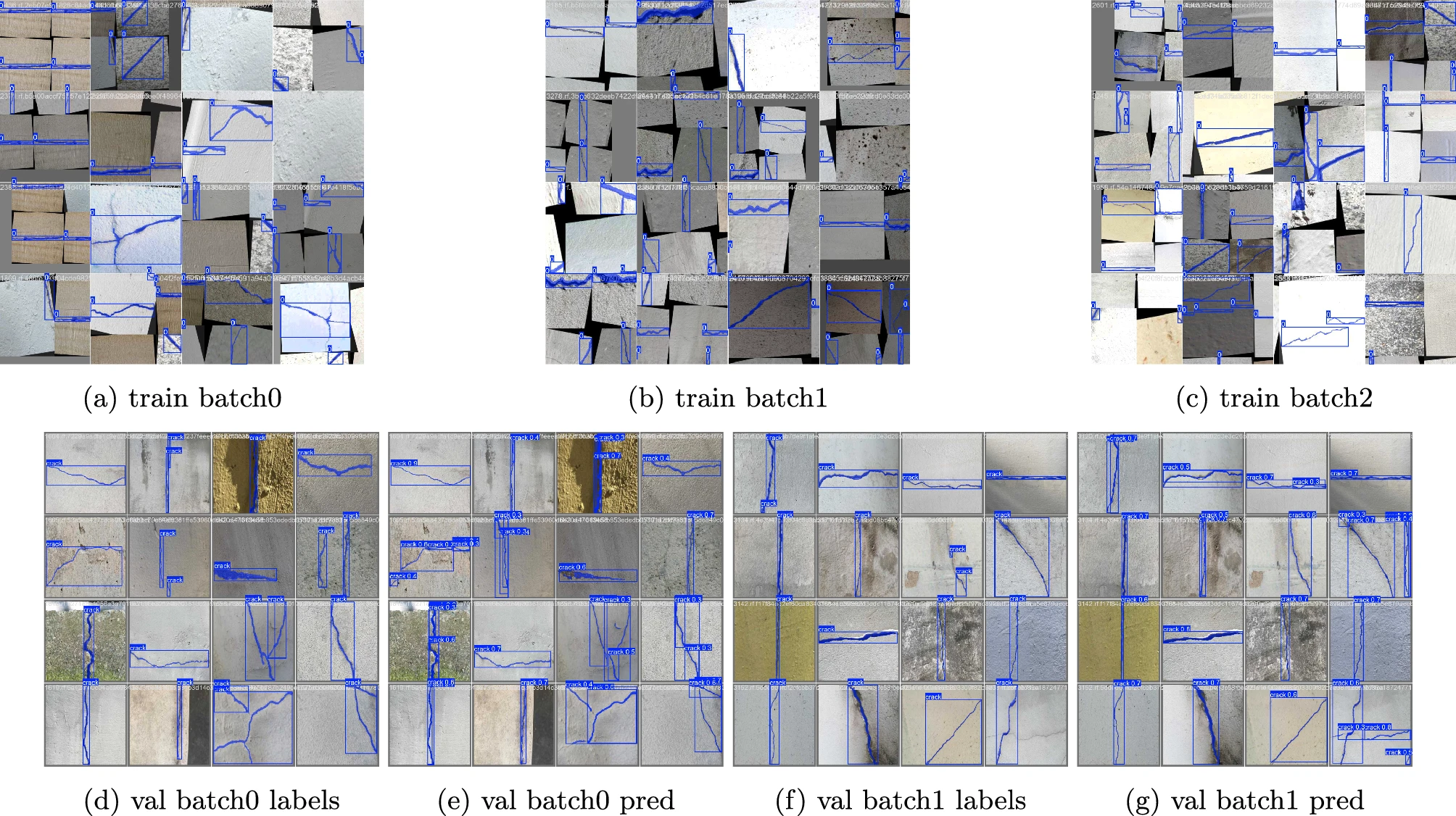
This open-access Scientific Reports paper proposes a lightweight YOLO11n-seg pipeline for real-time surface crack detection + segmentation. The emphasis on segmentation matters in structural health monitoring because crack geometry (width/length/area) is directly tied to damage severity and maintenance prioritization.
Key deployment-grade numbers: the model uses ~2.8M parameters, reaches Precision = 78.8%, Box mAP@50 = 76.2%, Mask mAP@50 = 58.7%, and runs at 3.6 ms per image on a Tesla T4. These trade-offs are strong for drone/robot inspection workflows.
How I’d pilot this in 10 business days
- Gather 1–2 hours of site imagery; define acceptance metrics (precision, false positives, crack-length error).
- Fine-tune YOLO11n-seg on your surface domain (lighting, texture); validate on a held-out route.
- Deploy on a drone/robot run; log mask-derived crack stats vs. engineer review for 2–3 days.