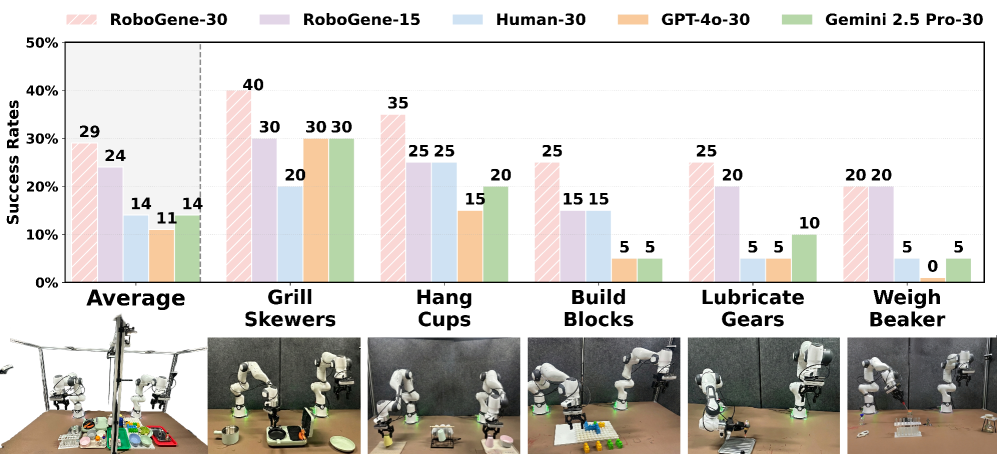
High‑quality real‑world robotic manipulation data is a key bottleneck for vision‑language‑action (VLA) model training. RoboGene proposes an agentic framework that automatically generates diverse and physically feasible robot tasks using a combination of diversity‑driven sampling, self‑reflection, and human‑in‑the‑loop refinement. By collecting approximately 18,000 real trajectories covering a broad task space, RoboGene significantly outperforms baseline data generation strategies — enabling better generalization and robustness of pre‑trained models.
How I’d pilot this in 10 business days
- Integrate RoboGene’s task generation framework into your simulation and real‑world collection pipeline.
- Pre‑train or fine‑tune your VLA models on the RoboGene dataset.
- Evaluate performance improvements on domain‑specific tasks against current baselines.